Pro Advanced Option / Unlimited ROM (Range of Motion)
The values are shown on the associated slider
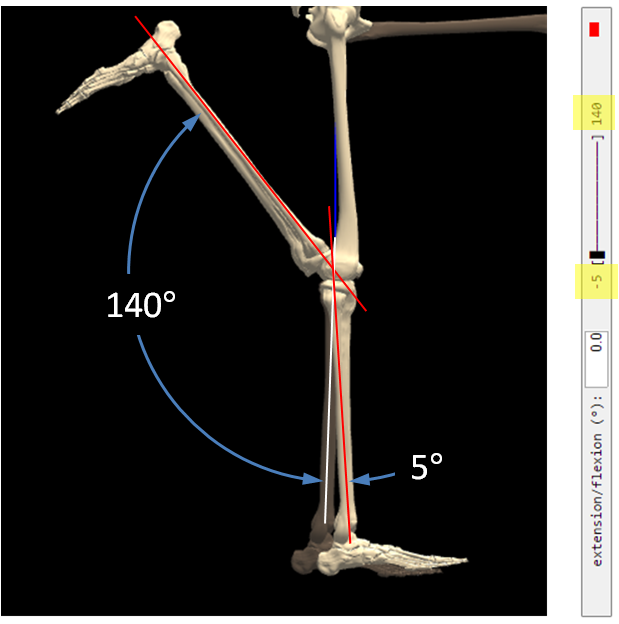
KineBody joint motions normally feature ‘realistic’ biomechanical behavior, in the sense that they use range of motion (ROM) limits and joint rotation axes derived from scientific literature and authoritative texts. The ROM limits are defined in terms of upper & lower limits for each degree of freedom (DOF). For example, when you select the tibio-femoral (knee) joint, you can move it up to 140° in flexion or 5° in extension. The upper & lower limit values are displayed at the ends of the corresponding slider for that DOF.
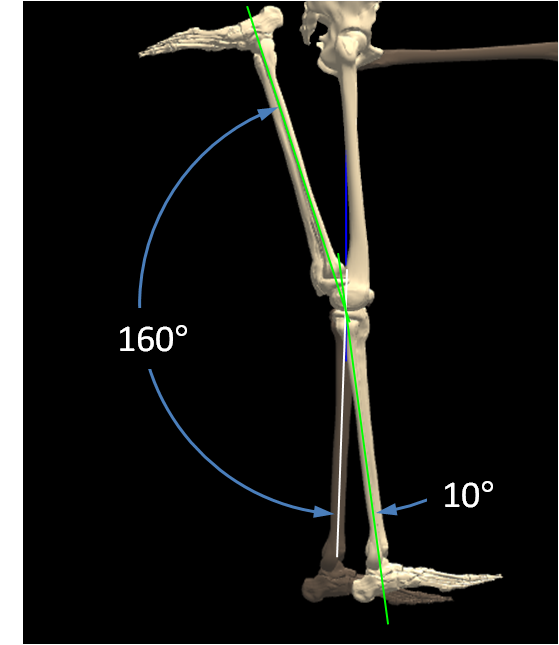
The upper & lower limit values are generally average values for adult populations, and as such they may be too restrictive to represent highly flexible individuals. KineBody Pro’s Unlimited ROM feature allows you to emulate these more flexible behaviors, by globally disabling the joint range limits. With unlimited ROM, you can move any joint beyond its prescribed limits, generally over a range of ±180°.

Invoking the Unlimited ROM is easy: the limits are enabled or disabled by a simple checkbox, which applies to all joints and all DOF at the same time. Furthermore, when you remove the limits, it applies not only to motions controlled by the sliders, but also to KineBody’s ‘view-integrated’ joystick: you can reach the out-of-range angles simply by dragging across the viewing area.
It’s just as simple to re-enable the limits. When you do, any ‘out-of-range’ angles are not automatically returned to the realistic range. Rather, they will remain as is, until you try to adjust those particular DOFs again. This makes it possible to disable the limits ‘selectively’: you can select Unlimited ROM before adjusting one particular joint DOF, then move the joint, and afterward, re-enable the ROM limits, so they will still apply to any future joint motions. In the meantime, the previous out-of-range joint motion will be unaffected.